Path Planning and Control for TurtleBot
A path planner for moving TurtleBot, a differential drive robot, around the room. The program is developed in Python and implemented using ROS.
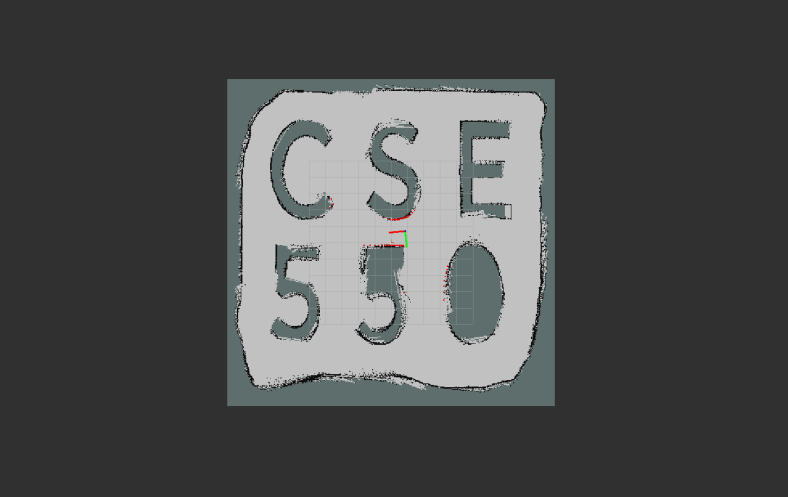
Mapping the Room using Laser Scanner
An algorithm to map the area around Robot using laser scan data. A grid map is produced to indicate empty and occupied cells/ areas.
Examples:
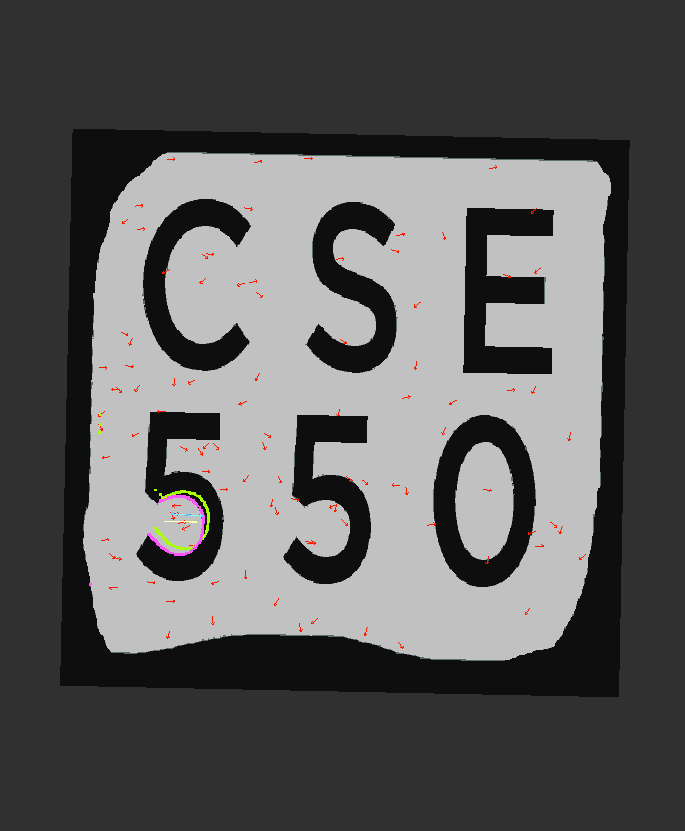
Robot Localization using Particle Filter
This algorithm is used to compute the robot’s current position with a given map using Particle filter approach.